Nonparametric Bayesian Inverse Problems
Nonlinear inversion problems, where we wish to infer the latent inputs to a system given observations of its output and the system’s forward-model, have a long history in the natural sciences, dynamical modeling and estimation. An example is the robot-arm inverse kinematics problem, where we wish to infer how to drive the robot’s joints (i.e. joint torques) in order to place the end-effector in a particular position, given we can measure its position and know the forward kinematics of the arm. Most of the existing algorithms either estimate the system inputs at a particular point in time like the Levenberg-Marquardt algorithm, or in a recursive manner such as the extended and unscented Kalman filters (EKF, UKF). In many inversion problems we have a continuous process; a smooth trajectory of a robot arm for example. Non-parametric regression techniques like Gaussian processes seem applicable, and have been used in linear inversion problems.
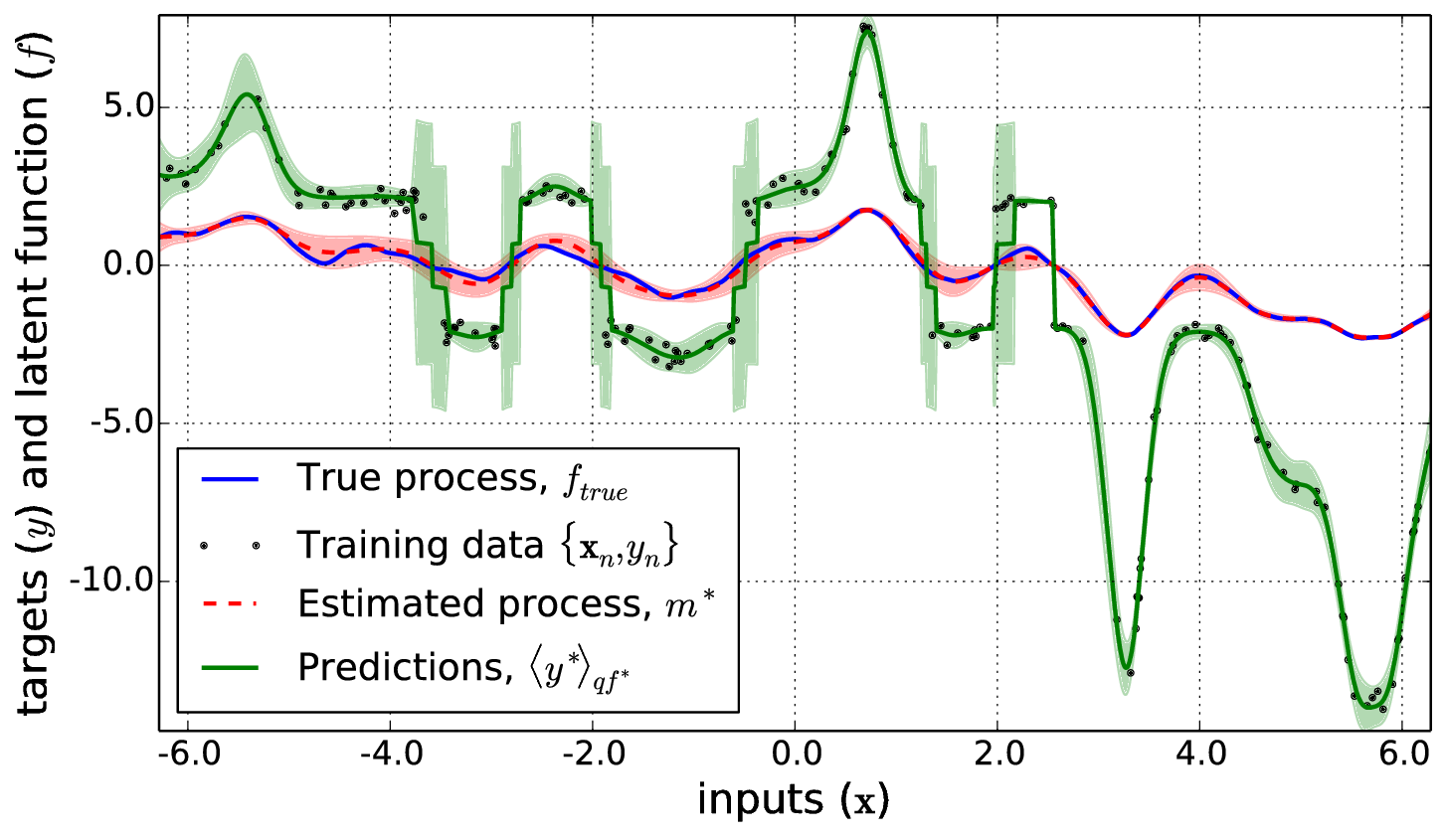
In this work we present two new methods for inference in Gaussian process (GP) models with general nonlinear likelihoods. Inference is based on a variational framework where a Gaussian posterior is assumed and the likelihood is linearized about the variational posterior mean using either a Taylor series expansion or statistical linearization. We show that the parameter updates obtained by these algorithms are equivalent to the state update equations in the iterative extended and unscented Kalman filters respectively, hence we refer to our algorithms as extended and unscented GPs. The unscented GP treats the likelihood as a ‘black-box’ by not requiring its derivative for inference, so it also applies to non-differentiable likelihood models. We evaluate the performance of our algorithms on a number of synthetic inversion problems and a binary classification dataset. See our NIPS spotlight paper for more details.